最近また、電子工作熱が出てきたのでアリエク物色!
はいはい、今日は何をポチったんですか?

ぐぬぬぅ! なぜポチったのがわかるのだ!
衝撃だったんでしょ?w
はい! またアリエクでポチってしまいました。
今回は、備忘録として記載。まだ到着していませんが、到着するころには「これなんだっけ?」という事態になることが多発していましたので、ポチッとしたらブログに書いていくことにします。
副次効果としては、ぽちったら記事を書かないといけなくなるので衝動買い防止にもなるかなと!今日買ったのはこれです。
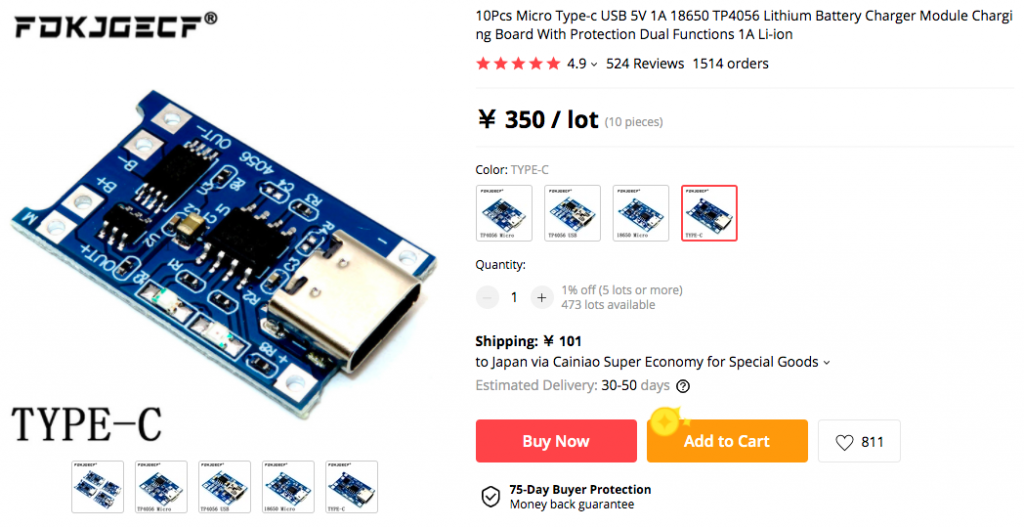
なんとお値段、送料込みで10個450円です。1個あたり45円と、価格破壊な値段ですね。たぶん、このUSB Type-Cコネクタは6pinだと思いますが、簡単な工作であればこれで十分です。マイクロUSBのタイプもありますが、やっぱり差し込む方向を意識しなくていいType-Cは便利です。今では100円均一でもケーブル売っていますしね。
リポ充電基盤とは?
5V 18650 リチウムバッテリー充電モジュール
投稿日: 2015年5月10日
5年くらい前にも購入していましたが、だいぶ数が少なくなったので追加購入です。この基盤は、リチウム電池を過充電、過放電しないための基盤です。メインチップは、TP4056で保護回路に、DW01A と ML8205A が乗っています。今回購入したのがどんなチップが乗っているかはまだ未調査ですが、まぁ仕様は同じでしょう。
この基盤、ちょっと電子工作して何か試作版を作る際に、リチウム電池とともに組込セットで詰め込むときに重宝します。
例えば、こんな感じで試作版に使っていました。

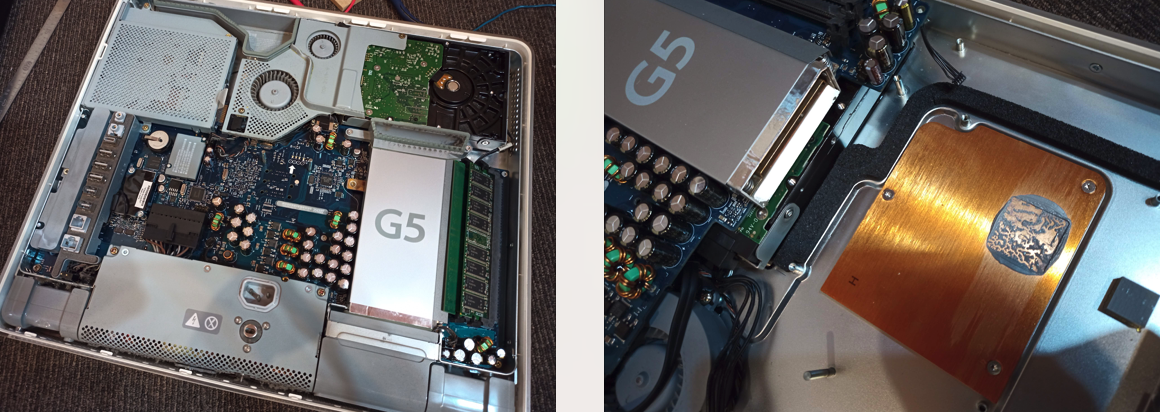
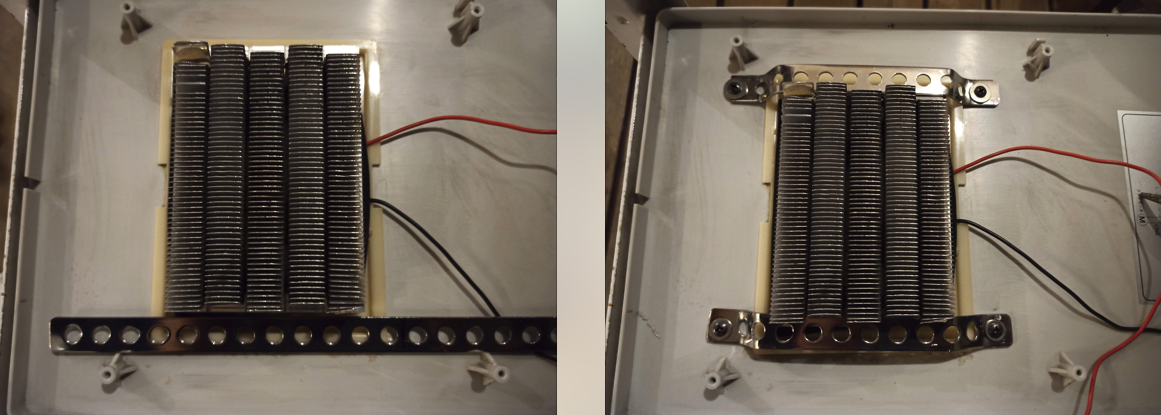
これはESP8266 ESP-12を使った温度・湿度・照度系のIoTデバイスなんですね。

ちょっと見えにくいですがマイクロUSBが刺さっている部分にその基盤があります。5Vからリチウム電池に充電し、5Vを放電します。他にも、ポケットオシロスコープを充電持ち運び仕様にしてみたりと。
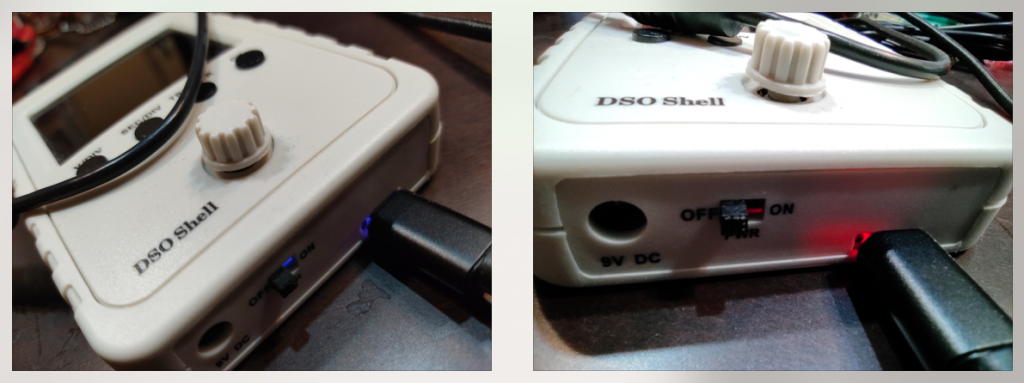
これの工作の記事は忙しくて書いていませんでしたが中にリポ電池とこの基盤などが入っています。簡単にでも書いておけばよかったなー。ちょっと持ち運んで何か計測したりとか便利でした。
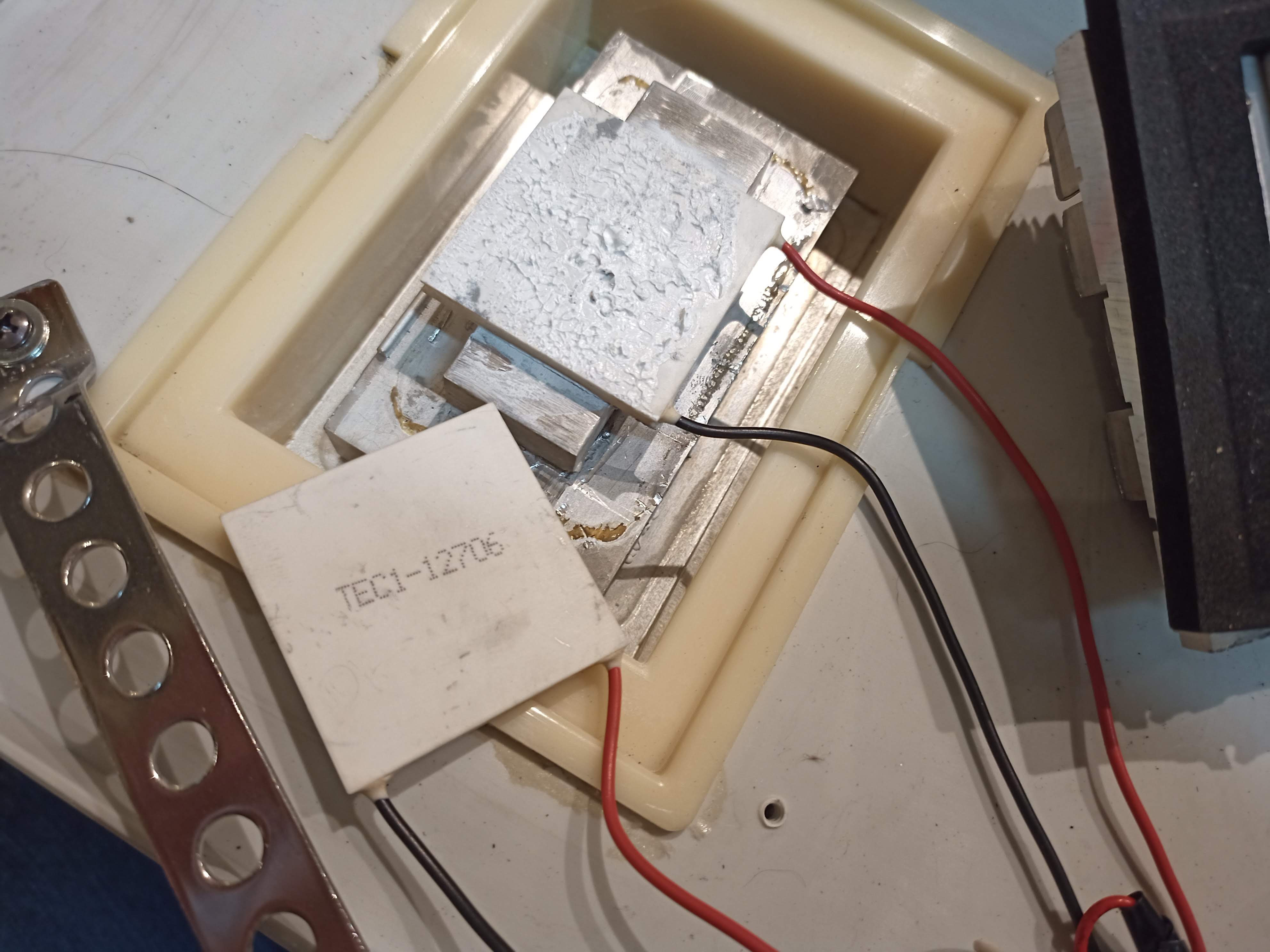
あと、自作基盤にこの充電ボードを乗っけた例もありますね。

この白い基盤は自作基盤でESP8266とバックブースト電源回路などが乗っています。充放電管理基盤は自作だと高くつくのでこんな感じで基盤にリフローして、くっつけて使っていました。
まとめ
今回、なんとなくわかったのは以下となります。
・Type-C版のTP4056充電管理基盤はケーブル接続が便利そう
・以前のマイクロUSB版より安くなっていた
・仕様が変更になっているのか、未調査
・今後、この基盤で工作していこうと思う
・基本的な構造は前のと同じだと思う
・到着したらまた検討してみる
あとがき
それにしても以前、マイクロUSB版のを購入したときは1個あたり97円だったのに。Type-C版でさらに安くなっています。余分な機能をなくし需要があるものを大量に作って、良いものを広く販売するという基本的な考え方はすごく好きです。反面、検品コストという考え方も日本とは違いますので不良品率はあがります。しかし、入念に検品して全体のコストをあげるより、ある程度の検品品質で不良品が混入すれば交換すれば良いという考え方もあるのも事実のようです。
薄利広商 という言葉があるようです。中国の文化なのか日本の文化なのか歴史に疎いので良くはわかりませんが、中国の商人の中にはこういう考え方があるんじゃないのかなと思います。意味合い的には、薄利多売と似ていますが、これは少しネガティブなイメージもあります。しかし、薄利広商 というのはあまり聞かない言葉ですが、薄い適切な利益を乗せて広く客に販売することが本来の商売であり、それは社会も良くしていくのだという考えのようです。売り手もどこよりお得にお客に販売するのは、本来気持ちの良いものだと思いますし、お客も安く良いものが入手できたら嬉しい。それは転じて地域もよくしていくのだという思想のようです。
少し前のマスク買い占め転売、プレステ5 の転売などそういうのは本来の商売ではない、長く商売をやっていくためにはもっと違う視点を持つべきだというのが「薄利広商」という言葉の真意なのではと思います。
著者にメッセージ
間違いのご指摘など、コメントじゃなくて、個人的にやりとりしたい場合はこちらからどうぞ。お返事が遅くなるときもありますが、ご了承を。